Arduino - Servo.writeMicroseconds()
Description
Envoie une valeur en microsecondes (µs) au servomoteur qui contrôle en conséquence la position de l'axe :
sur un servomoteur standard, ceci détermine l'angle de l'axe. Sur les servomoteurs standards, un paramètre de valeur 1000 µs est la position extrême dans un sens (vers 0°), 2000 est la position extrême dans le sens inverse (vers 180°) et 1500 est au milieu (vers 90°).
En fait, de nombreux fabricants ne respectent pas ces standards très précisément et les servomoteurs obéissent à des valeurs entre 700 et 2300. (A titre d'exemple, l'instruction Servo.attach() de la librairie Servo initialise le servomoteur par défaut avec les valeurs 544 et 2400). N'hésitez-pas à repousser ces valeurs limites tant que le servomoteur continue à se positionner. Noter cependant qu'essayer de positionner un servomoteur à ces positions extrêmes (souvent manifesté par un son grondant) entraîne une intensité élevée, et doit être évité (notamment si l'alimentation se fait directement par la carte ...ARDUINO)
Les servomoteurs à rotation continue répondront à l'instruction writeMicrosecond de façon analogue à la fonction Servo.write() de la librairie Servo.
Syntaxe
Paramètres
- servo: une variable de type Servo
- uS: la valeur envoyée au servomoteur microsecondes (int)
Exemple
Hardware Required
| 1 | × | Official Arduino Uno | |
| 1 | × | Alternatively, DIYables STEM V3, Fully Compatible with Arduino Uno R3 | |
| 1 | × | USB 2.0 cable type A/B | |
| 1 | × | Servo Motor | |
| 1 | × | Jumper Wires |
Additionally, some links direct to products from our own brand, DIYables .
Buy Note: When using multiple servo motors, we recommend the PCA9685 16 Channel PWM Servo Driver Module to save MCU pins and make wiring easier.
Wiring Diagram
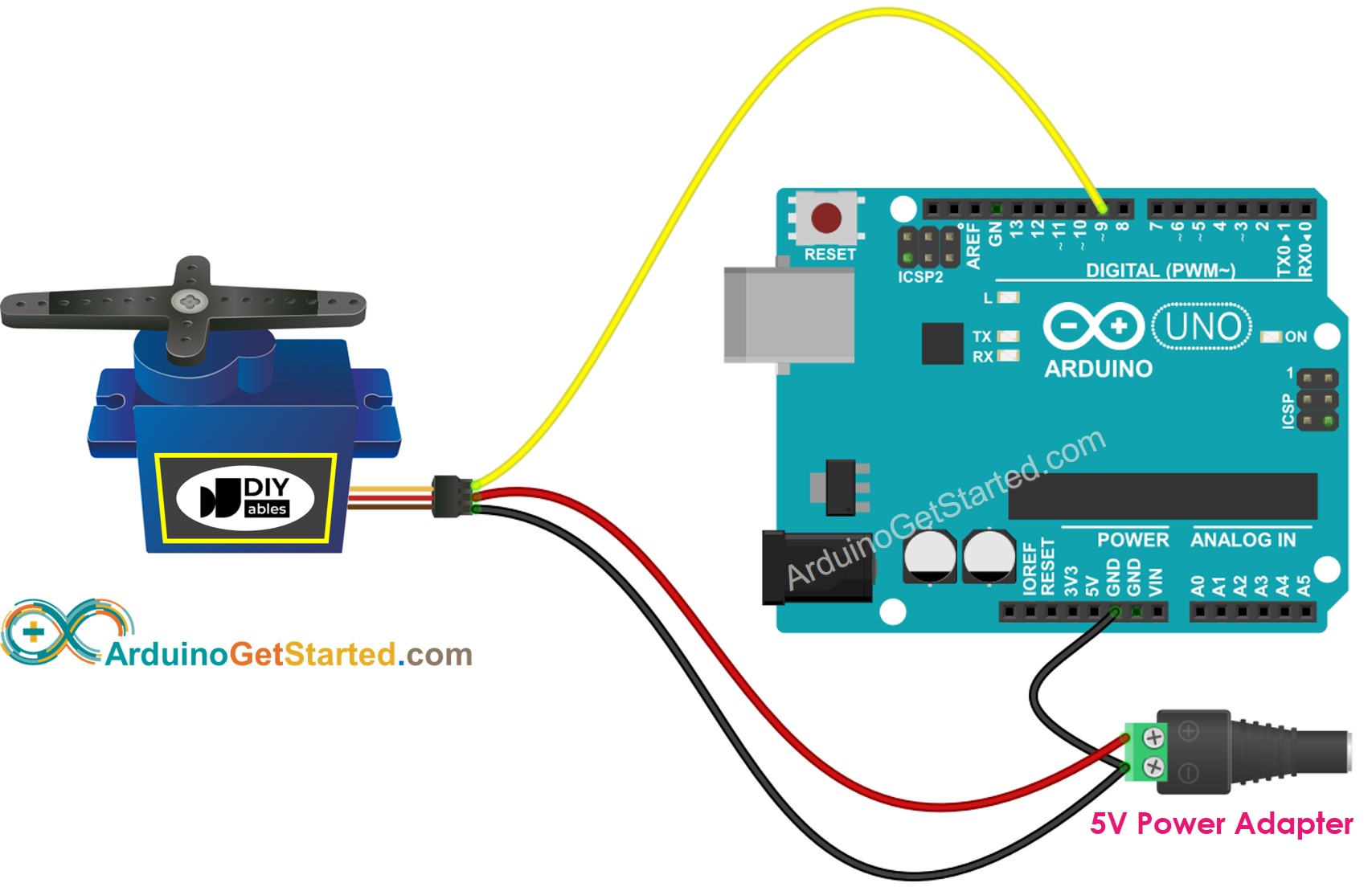
This image is created using Fritzing. Click to enlarge image
Arduino Code
※ Remarque:
Cette instruction génère une impulsion de la largeur indiquée en microsecondes qui positionne le servomoteur. Cette impulsion est générée de façon continue ce qui assure un positionnement permanent du servomoteur sur cette position.
Voir également
※ ARDUINO BUY RECOMMENDATION
| Arduino UNO R3 | |
| Arduino Starter Kit |